DEMNet: Evaluating Solar Differential Emission Measure Inversion with Deep Learning
1 Courant Institute, New York University 2 NorthWest Research Associates 3 University of Graz

Abstract
The Differential Emission Measure (DEM) is a key diagnostic tool for understanding the solar atmosphere; commonly it connects images obtained in the extreme ultraviolet to the thermal structure of the solar corona through mathematical inversion. Traditional DEM inversion methods are based on per-pixel optimization and are very computationally expensive, thus prohibitive for large-scale analysis.
We present and analyze DEMNet, a deep learning model that emulates a classical solver. DEMNet is far faster, provides uncertainties, and is smoother over multiple dimensions than traditional methods. We analyze DEMNet's predictions as well as several design decisions that are critical to its success.
DEMNet
DEMNet is a pixel-wise neural network that maps six EUV filter observations from NASA's SDO/AIA (at 94, 131, 171, 193, 211, 335 Å) to the DEM vector over 18 temperature bins. It builds on the earlier DeepEM model, adding Fourier frequency encodings to capture sharp intensity variations, uncertainty quantification via a classification head, and a physics-inspired forward-model finetuning stage. The model is trained on ~293K patches from 917 full-disk timestamps (Jan 2014 – Dec 2015), using inversions from classical methods as targets.
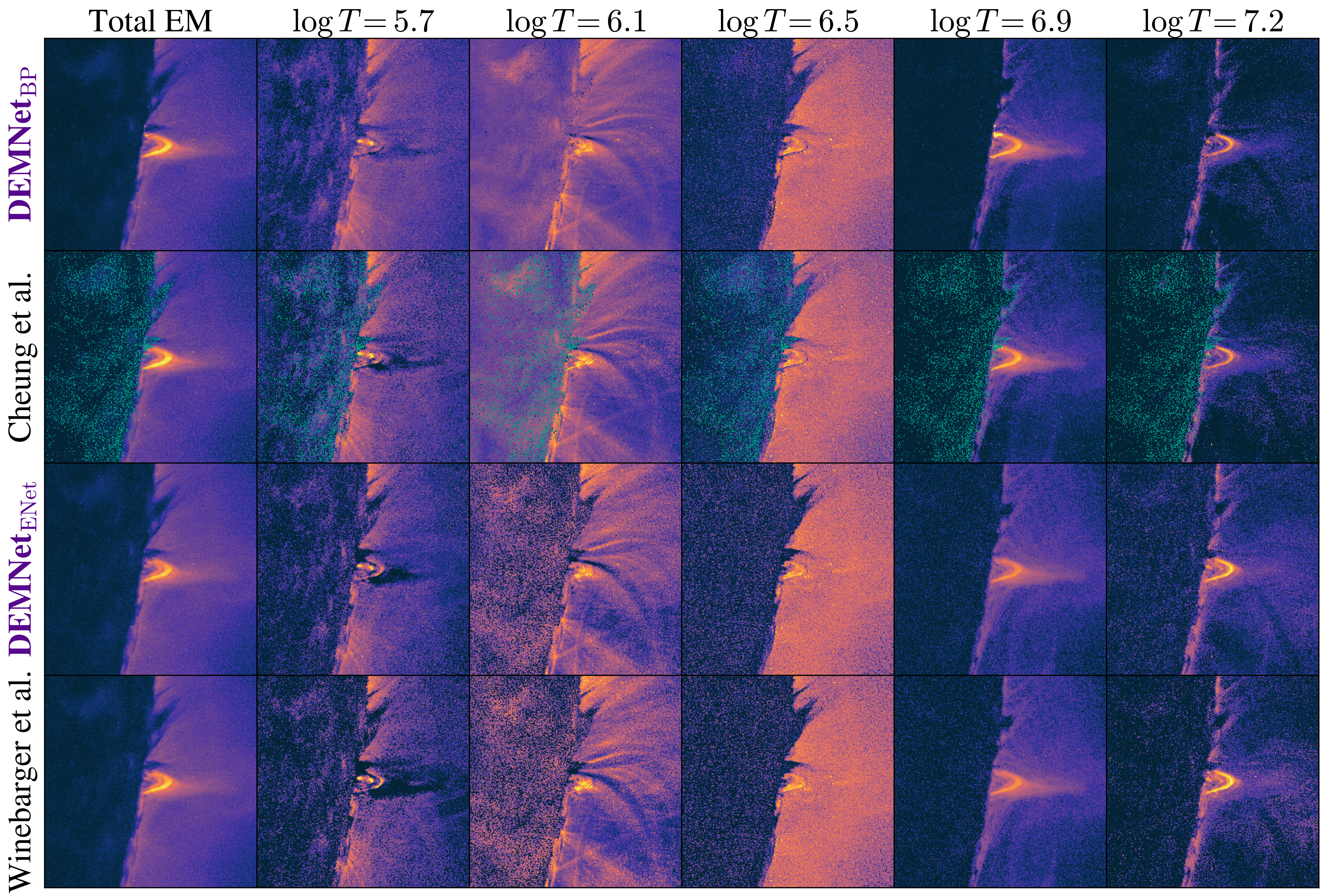
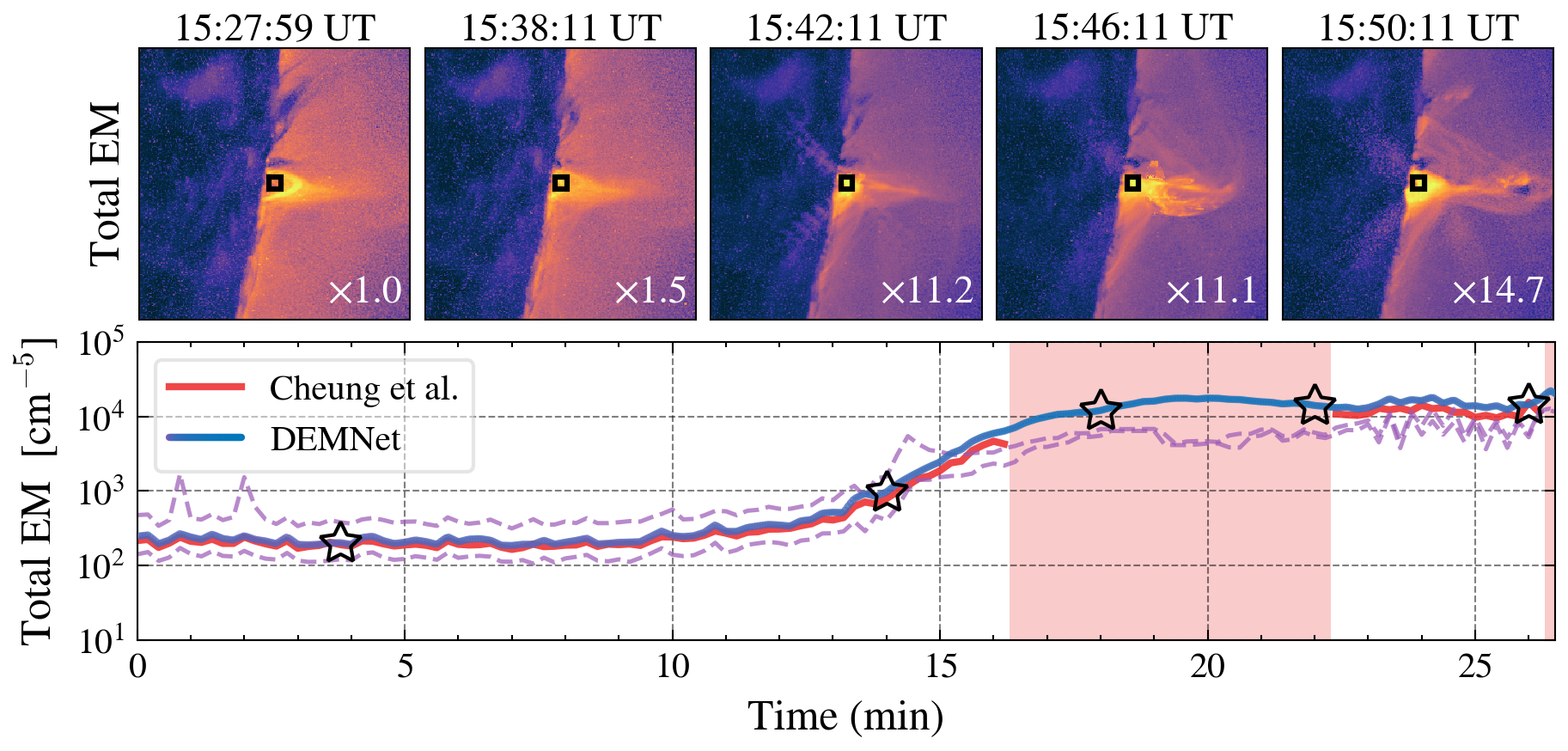
DEMNet processes pixels independently and produces outputs that are smooth both across space and over time. The figure below shows four frames during the impulsive phase of the 2017 Sep. 10 X8.2 flare: DEMNet predicts the evolution of the event smoothly. The time series highlights the failures of Basis Pursuit (red region), where DEMNet continues to produce plausible predictions throughout.
 log-transformed.
log-transformed.What the Network Learned
A critical question when deploying a neural network in a scientific pipeline is: what did it actually learn? We probe this through two lenses: structure and scale.
To understand the learned structure, we compare DEMNet to a K-nearest-neighbor (KNN) model built on the full training set. For most pixels, the two methods agree closely, suggesting the network behaves largely as a smooth lookup table over AIA input space. The divergence happens at high intensities, exactly where the physics is most interesting: there, DEMNet's learned non-linearity gives it an advantage.
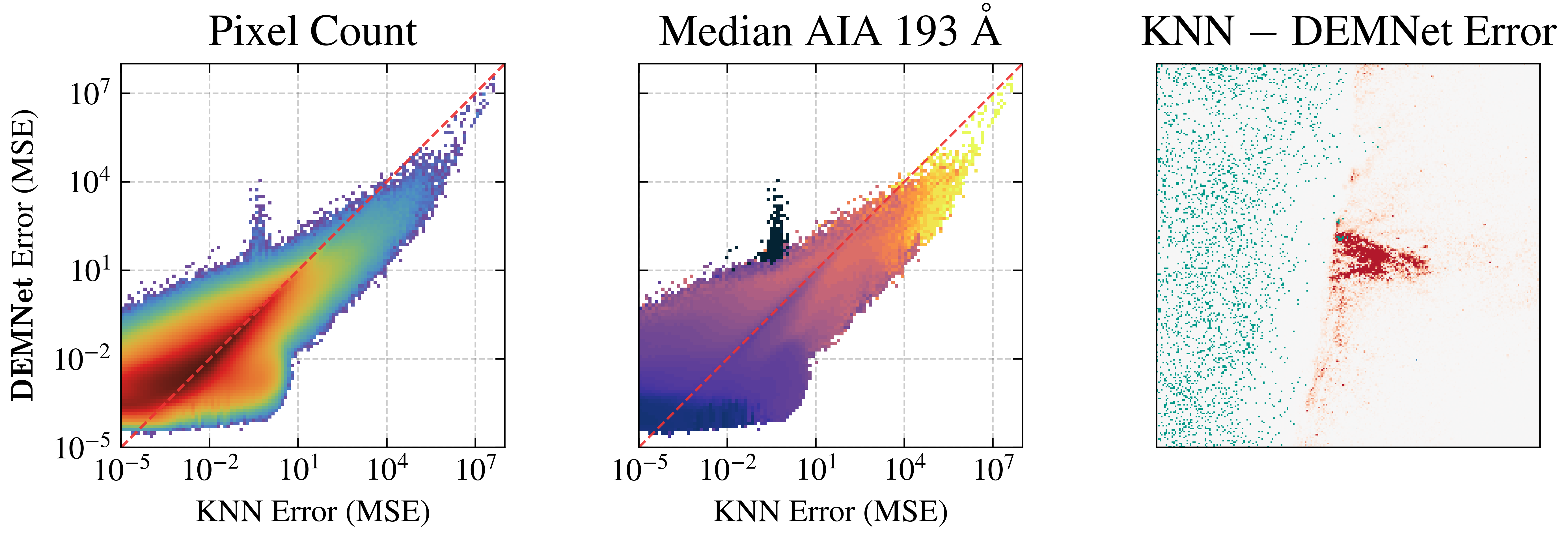
 in log scale; the diagonal indicates near-identical performance for most pixels. (Center) Same density colored by AIA 193 intensity
in log scale; the diagonal indicates near-identical performance for most pixels. (Center) Same density colored by AIA 193 intensity  ; divergence concentrates at the brightest regions. (Right) Per-pixel MSE difference during the 2017 Sep. 10 flare
; divergence concentrates at the brightest regions. (Right) Per-pixel MSE difference during the 2017 Sep. 10 flare  ; red: DEMNet outperforms KNN; blue: reverse. The pre-flare loop is the main region where DEMNet outperforms KNN.
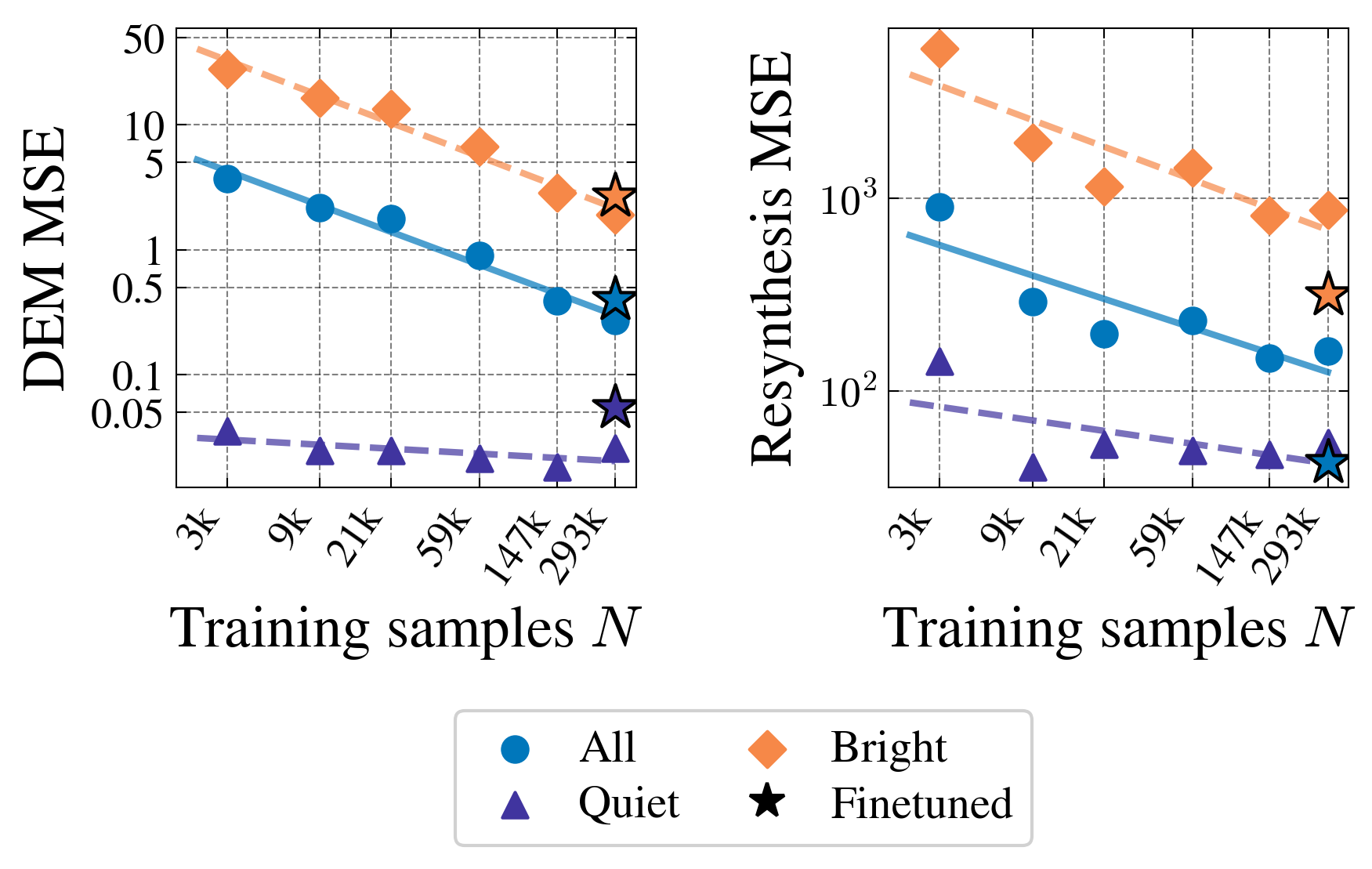
; red: DEMNet outperforms KNN; blue: reverse. The pre-flare loop is the main region where DEMNet outperforms KNN. The scaling plot reveals that performance improves consistently with more data. Bright pixels (active regions, flares, coronal loops) are the hardest cases and benefit the most from scale. Quiet-sun pixels, which make up the bulk of the disk, are largely saturated even at smaller training sizes, consistent with the KNN finding that these can be retrieved by possibly a simpler model. Forward-model finetuning (star) further improves resynthesis at a modest accuracy cost.